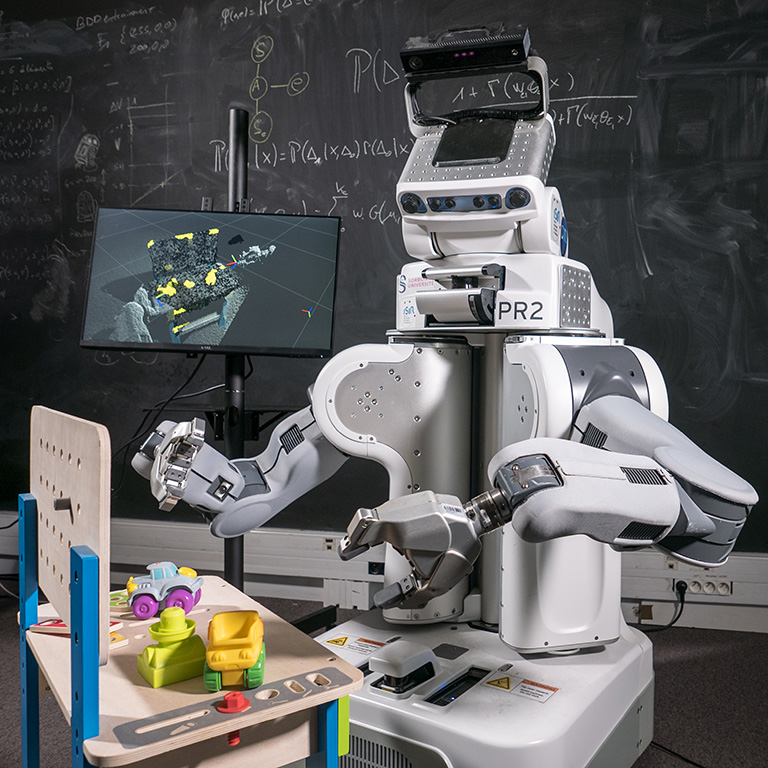
Apprendre à voir
Pour PR2, robot de service autonome, se repérer dans un environnement inconnu est une tâche complexe mais loin d’être impossible ! À l’aide de sa caméra 3D située sur sa « tête » et de son dispositif de capture optique de mouvement, PR2 est capable de percevoir ce qui l’entoure et apprend à voir ce qu’il peut déplacer, soulever ou enfoncer en utilisant sa pince. L’écran nous montre ici la représentation de son environnement en construction. Les petits objets avec lesquels le robot a appris qu’il pouvait interagir sont représentés en jaune. Interactions après interactions, PR2 parvient ainsi, grâce à un algorithme d’apprentissage, à construire sa propre vision du monde reposant sur ses capacités.
Technique
Appareil photo
Crédits
Philippe Gauthier, Institut des Systèmes Intelligents et de Robotique, ISIR, (CNRS/Sorbonne Université), Equipe AGATHE (INSERM)